
课题组已有项目
1. 国家自然科学基金面上项目: “基于人-信息-物理系统的双臂协作机器人安全交互方法研究”,2024-2027 (主持)
2. 浙江省基础青年基金项目(杰青延续资助): “机器人柔性多模态感知及交互”,2025-2027 (主持)
3. 中国电子学会-腾讯Robotics X犀牛鸟专项研究计划: “多源感知驱动的家用辅助机器人安全交互技术研究”,2023-2024 (主持)
4. 浙江省科技厅“尖兵领雁+X”研发攻关计划: “智能配网带电作业机器人研发及应用”,2024-2026 (参与)
5. 科技部长三角科技创新共同体联合攻关计划项目: “智能配网带电作业机器人研发及应用”,2023-2027 (参与)
6. 国家自然科学基金面上项目: “面向安全助老的双臂协同机器人情感认知和行为交互方法研究”,2020-2023 (主持) 【优秀结题】
7. 国家自然科学基金重大项目: “面向航空EHA热流固环境多源感知和智能健康监测”,2019-2023 (参与) 【优秀结题】
8. 国家重点研发计划,网络协同制造与智能工厂专项 “大型掘进设备控制系统研发与应用” 子课题: “大型掘进设备导向与液压驱动控制组件开发”,2021-2023 (参与)
9. 浙江省基础青年基金项目(杰出青年基金): “人机融合协作机器人多模态柔性感知及共融交互研究”,2020-2023 (主持) 【优秀结题】
10. 宁波科技创新2025重大专项: “柔弹性传感技术及其在可穿戴助行机器人共融交互中的应用”,2021-2023 (主持)
11. 世界大学联盟特殊资助计划——新冠病毒应急攻关项目:“面向 COVID-19 流行病干预阻断的隔离病房护理遥操作机器人系统”,合作者: 英国谢菲尔德大学,澳大利亚悉尼大学,(资助率15%,同年中国大陆唯一获批项目),2020-2021 (主持)
课题组科研成果
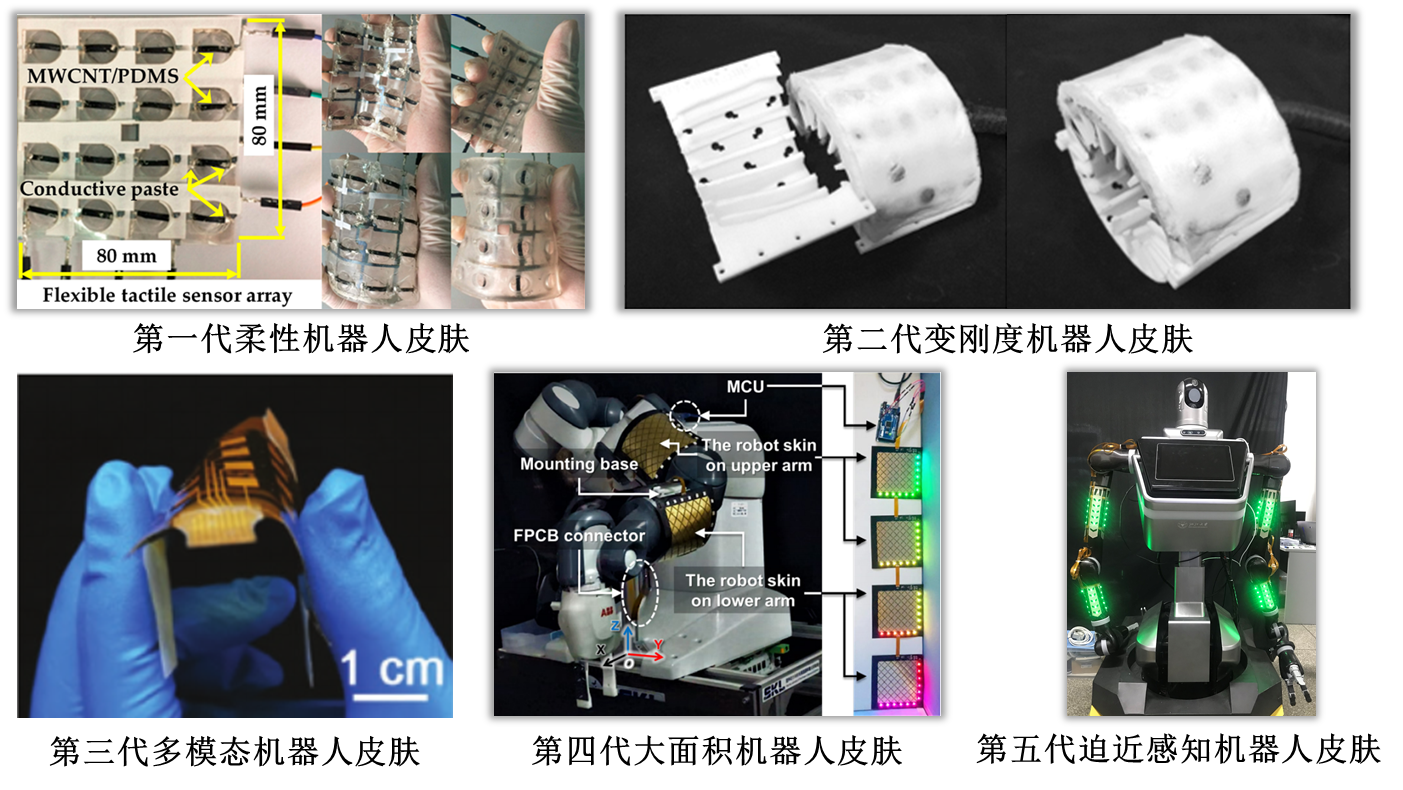
The Development of Collaborative Robot Skin (From 1st to 5th Version)
Our research team has developed four versions of collaborative robot skin. 1st Version of CoboSkin is a Silicon-rubber-based e-skin with the function of force detection and proximity detection. 2nd Version is a Sponge-based e-skin made from sponge porous substrate and carbon black. 3rd Version is a Printed flexible e-skin made by Inkjet printing and direct writing extrusion printing. 4th Version is a Hybrid e-skin based on FPCB. It can expand units in a large area to cover the surface of the robot. 5th Version has a proximity perception function.
第一至第五代柔性机器人皮肤的研制
我们团队已经研发出五代柔性机器人皮肤。第一代是硅胶类皮肤,具有力检测和接近距离检测功能。第二代海绵多孔类皮肤由海绵多孔基底与超导电炭黑制成。第三代印制柔性皮肤,可感知压力、温度、迫近。第四代基于FPCB的异构集成皮肤,能够大面积扩展皮肤单元数量,全面覆盖机器人本体表面。第五代皮肤具有迫近感知功能。

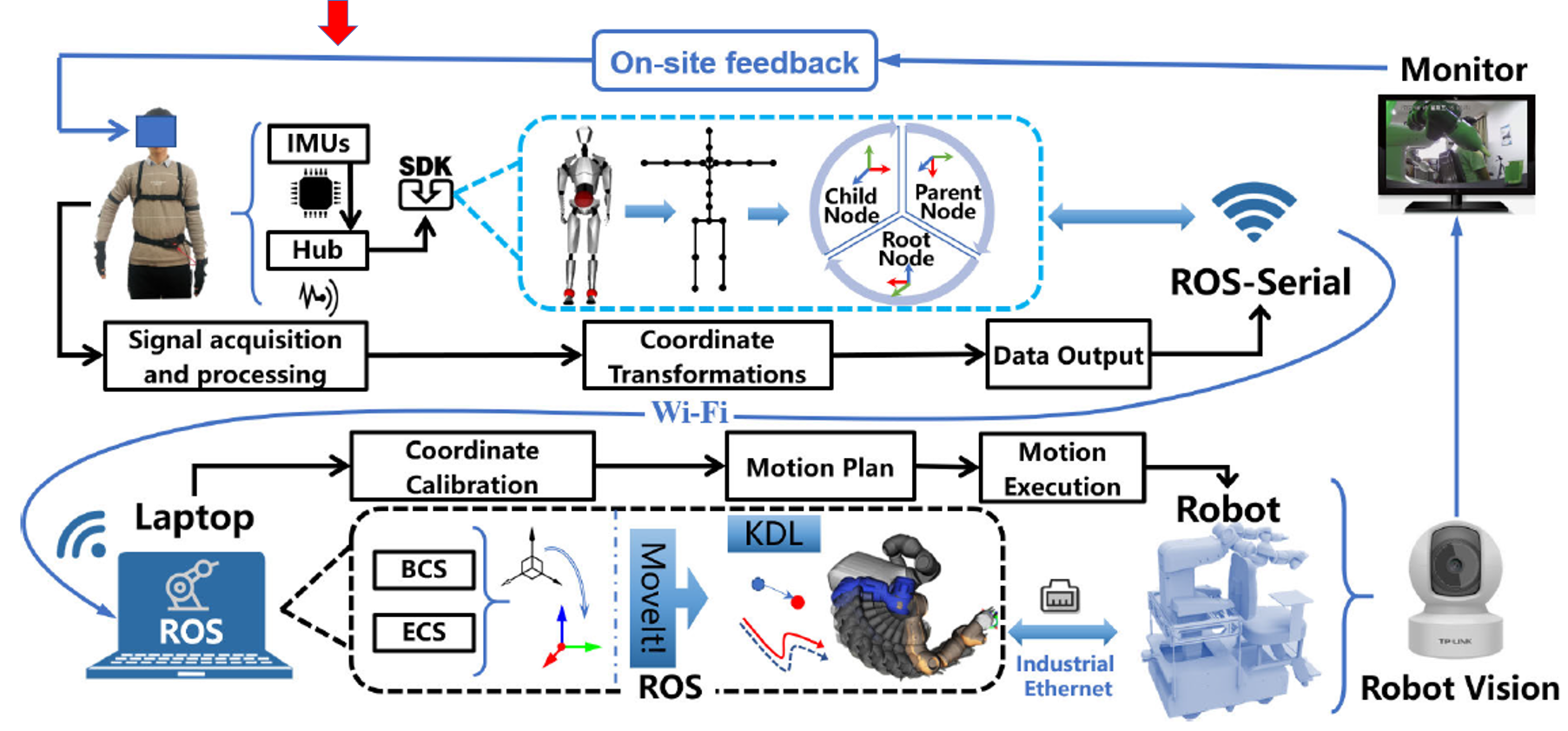

Development of The Robotic Platforms (From 1st to 3rd Version)
We have built three robotic platforms from RV1 to RV3: ① the RV1 platform is based on Yumi dual-arm robot and is cooperated with wheat wheel Omni-directional mobile chassis, and Teleoperation technology of dual-arm collaborative robot pose mapping has been used in the 2019-nCoV emergency project[LINK]; ② the RV2 platform, three DoFs structure of the body are self-designed for more flexible application and we cooperated with the China Academy of Art to carry out the appearance industrial design of the RV2 robot; ③ development of the RV3 platform is now in progress, with the software and hardware fully realized by ourselves, the structure of the manipulator is designed, and the motor selection and driving circuit are optimized.
第一至第三代机器人平台集成开发搭建
我们搭建了三代机器人双臂平台:①第一代机器人平台以YuMi双臂机器人为基础,配合麦轮全向移动底盘,其中有双臂协作机器人位姿映射遥操作技术已在新冠应急项目[LINK]中进展临床落地使用;②第二代机器人平台,自行设计三自由度躯干结构(升降,俯仰,旋转),以双Kinova机械臂为基础搭建,可以实现更灵活的应用。同时与中国美术学院合作进行了RV2机器人的外观工业设计工作;③第三代机器人平台现正在进行中,以软硬件完全实现自主设计为主旨,设计机械臂结构,并优化电机选型、驱动电路等。

Cloud-based robot sensing digital twin
The cloud server can subscribe to all topics of local robots in real-time, including posture, torque, speed, and sensor parameters, so as to realize the cloud visualization of robots and facilitate remote monitoring of robots by experimenters.
机器人云端数字孪生
机器人和机器人皮肤数字孪生通过在机器人工控机和云服务器之间建立虚拟专用网络(VPN),实现了工控机和云服务器的互相通信。云服务器可以实时订阅本地机器人包括位姿、力矩、速度和传感器参数等在内的全部话题,实现机器人的云端可视化,便于实验人员对机器人进行远端监控。